
Building Scalable ROS 2 Applications with Microservice Architecture
15 Oct 2025
By lowering latency and resource consumption across platforms, containerization improves autonomous driving systems' performance, isolation, and stability.
Containerization Solves ROS 2's Biggest Performance Challenges
15 Oct 2025
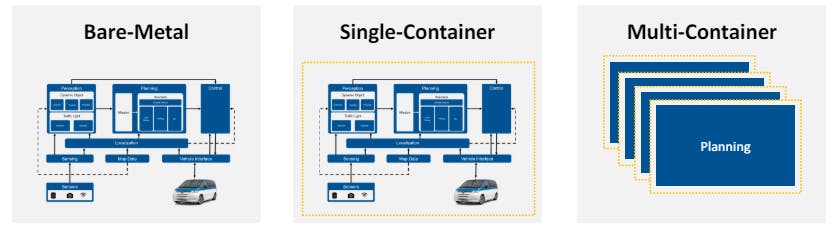
Containerized microservices outperform conventional bare-metal configurations in autonomous car systems by reducing latency, jitter, and resource consumption.

Can Docker Keep Up with the Speed of Self-Driving Cars?
15 Oct 2025
According to experiments, containerized microservices improve resource usage, lower latency, and increase modularity in software for autonomous driving.

Modular Design Is Solving Autonomous Driving's Biggest Challenges
15 Oct 2025
Using containerized ROS 2 modules, microservice-based architecture improves autonomous driving systems' speed, latency, and adaptability.
A Real-World Latency Study of Microservice Architectures in Autonomous Driving
14 Oct 2025
Containers cut latency and improve performance in software-defined vehicles. A study shows up to 8% faster response in autonomous systems.